本章以串口為例講解,HAL 庫輪詢,中斷,DMA 三種編程模型。
1.前情回顧
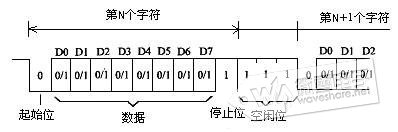
在串行通信中,一個字符一個字符地傳輸,每個字符一位一位地傳輸,並且傳輸一個字符時,總是以“起始位”開始,以“停止位”結束。在進行傳輸之前,雙方一定要使用同一個波特率設置。波特率就是每秒鐘傳輸的數據位數。
常用的兩種基本串行通信方式包括同步通信和異步通信。我們通常使用的是異步通信.異步通信規定傳輸的數據格式由起始位(start bit)、數據位(data bit)、奇偶校驗位(parity bit)和停止位(stop bit)組成。
2.重定義printf函數。
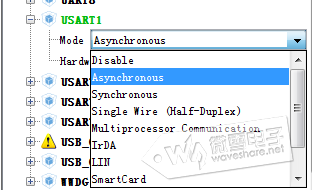
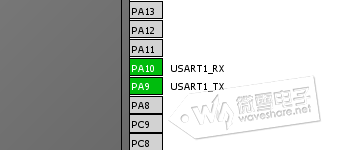
打開STM32CubeMX新建工程,選擇STMF746IGT6芯片,選擇外部高速晶振(HSE)。USART1選擇為異步通信方式。PA10設置RX接收,PA9設置為TX發送。
配置時鐘系統時鐘為216MHz,STMF746可以單獨配置USART時鐘,默認為108Mhz。
串口配置設置波特率為115200 Bits/s。傳輸數據長度為8 Bit。奇偶檢驗無,停止位1.其他參數默認。
生成報告以及代碼,編譯程序。在usart.c文件中可看到串口1的初始化函數MX_USART1_UART_Init(void),以及管腳配置函數HAL_UART_MspInit() 。
C語言中的標準庫中所用的標準輸出函數,默認的輸出設備是顯示器,要實現串口或LCD的輸出,必須重新定義標準庫函數里與輸出函數相關的函數。例如:printf輸出到串口,需要將fputc裡面的輸出指向串口(重定向),方法如下:只要自己添加一個int fputc(int ch, FILE *f)函數,能夠輸出字符就可以了。
在usart.c文件後面添加如下代碼,代碼中添加了#ifdef宏定義進行條件編譯,如果使用GUNC編譯,則PUTCHAR_PROTOTYPE定義為int __io_putchar(int ch)函数,否则定义为int fputc(int ch, FILE *f)函数。
05 | #define PUTCHAR_PROTOTYPE int __io_putchar(int ch) |
07 | #define PUTCHAR_PROTOTYPE int fputc(int ch, FILE *f) |
18 | HAL_UART_Transmit(&huart1, (uint8_t *)&ch, 1, 0xFFFF); |
其中HAL_UART_Transmit(&huart1, (uint8_t *)&ch, 1, 0xFFFF);這個語句表示通過串口1發個一個字符。ch為字符的存儲地址,0xFFFF為超時時間。在stm32f7xx_hal_uart.c文件中可以找到HAL_UART_Transmit函數。
在main.c文件中添加應用函數。
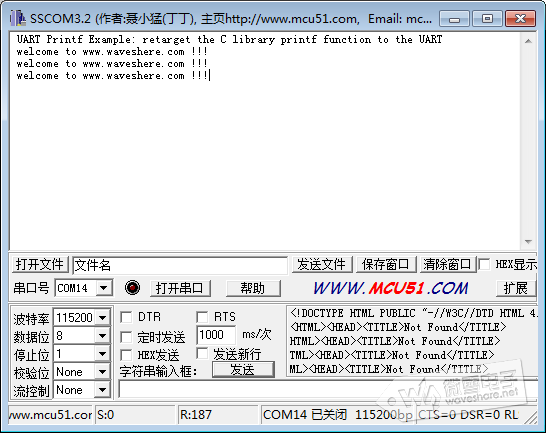
02 | printf("\n\r UART Printf Example: retarget the C library printf function to the UART\n\r"); |
12 | printf("\n\r welcome to www.waveshere.com !!!\n\r"); |
編譯程序並下載到開發板。用USB線連接開發板到電腦,在電腦上打開串口調試助手。選擇對應的串口號,設置波特率為115200。按下復位按鍵會接收到如圖信息。
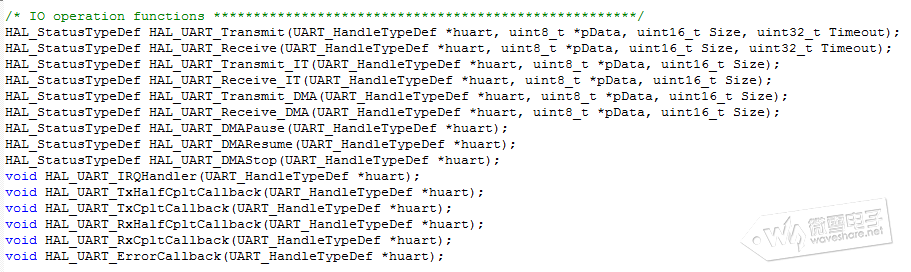
打開stm32f7xx_hal_uart.h頭文件,在文件後最後面可以看到有如下操作串口的函數。
串口的發送接收函數:
HAL_UART_Transmit();串口輪詢模式發送,使用超時管理機制。
HAL_UART_Receive();串口輪詢模式發送,使用超時管理機制。
HAL_UART_Transmit_IT();串口中斷模式發送,
HAL_UART_Receive_IT();串口中斷模式發送
HAL_UART_Transmit_DMA();串口DMA模式發送
HAL_UART_Receive_DMA();串口DMA模式發送
串口相關的中斷函數:
HAL_UART_TxHalfCpltCallback():一半數據(half transfer)發送完成後,通過中斷處理函數調用。
HAL_UART_TxCpltCallback():發送完成後,通過中斷處理函數調用。
HAL_UART_RxHalfCpltCallback():一半數據(half transfer)接收完成後,通過中斷處理函數調用。
HAL_UART_RxCpltCallback():接收完成後,通過中斷處理函數調用。
HAL_UART_ErrorCallback():傳輸過程中出現錯誤時,通過中斷處理函數調用。
可看到串口發送和就是有三種通信模式:
第一種是上面用到的輪詢的模式。CPU不斷查詢IO設備,如設備有請求則加以處理。例如CPU不斷查詢串口是否傳輸完成,如傳輸超過則返回超時錯誤。輪詢方式會佔用CPU處理時間,效率較低。
第二種就是中斷控制方式。當I/O操作完成時,輸入輸出設備控制器通過中斷請求線向處理器發出中斷信號,處理器收到中斷信號之後,轉到中斷處理程序,對數據傳送工作進行相應的處理。
第三種就是直接內存存取技術( DMA)方式。所謂直接傳送,即在內存與IO設備間傳送一個數據塊的過程中,不需要CPU的任何中間干涉,只需要CPU在過程開始時向設備發出“傳送塊數據”的命令,然後通過中斷來得知過程是否結束和下次操作是否準備就緒。
3.中斷模式。
打開STM32CubeMX重新建工程,配置和前面一樣。只是這個工程中,開啟了串口中斷。
生成報告以及代碼,編譯程序。在main函數前面添加兩個數組變量。
5 | uint8_t aTxStartMessage[] = "\r\n****UART-Hyperterminal communication based on IT ****\r\nEnter 10 characters using keyboard :\r\n"; |
在main函数中添加两个语句通过串口中断发送aTxStartMessage数组的数据和接收数据10个字符,保存在数组aRxBuffer中。
2 | HAL_UART_Transmit_IT(&huart1, (uint8_t *)aTxStartMessage, sizeof(aTxStartMessage)); |
3 | HAL_UART_Receive_IT(&huart1, (uint8_t *)aRxBuffer, 10); |
在main.c文件后面添加中断接收完成回调函数。中断回调函数中将接收到的数据又通过串口发送回去。
07 | void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart) |
15 | HAL_UART_Transmit(&huart1, (uint8_t *)aRxBuffer, 10,0xFFFF); |
编译程序并下载到开发板。用USB线连接开发板到电脑,在电脑上打开串口调试助手。选择对应的串口号,设置波特率为115200。按下复位按键会接收到aTxStartMessage数组的数据。通过串口助手发送10个字符,串口助手回显示发送的数据。注意:串口要发够10个字符串,才会触发中断。少于10个字符则不会触发中断,串口不会显示发送的数据。超过10个字符,串口只会发送10个字符回来显示。
資料來源:https://www.waveshare.net/study/article-644-1.html